











- WYWIADY
Drony od ITWL gotowe do wykrywania nielegalnej migracji [WYWIAD]


Autor. ITWL
„Celem przyznanego przez Ministerstwo Rolnictwa i Rozwoju Wsi grantu było opracowanie systemu ASFochrona, zdolnego do wykrywania watah dzików i identyfikacji osobników z objawami klinicznymi afrykańskiego pomoru świń. System ten składa się z dwóch bezzałogowców – AtraxASF i NeoxASF” – mówi w rozmowie z InfoSecurity24.pl dr inż. Paweł Szczepaniak, kierownik Zakładu Kompozytowych Konstrukcji Lotniczych Instytutu Technicznego Wojsk Lotniczych. Dodał, że dzięki zaawansowanym głowicom dronów możliwe byłoby ich użytkowanie także w Straży Granicznej do zapewnienia należytego bezpieczeństwa państwa polskiego i wykrywania nielegalnej migracji na tzw. granicy zielonej.
Kacper Bakuła: Instytut Techniczny Wojsk Lotniczych od wielu lat rozwija bezpilotowce Atrax i Neox. Kogo możemy zaliczyć do grona ich użytkowników.
dr inż. Paweł Szczepaniak, kierownik Zakładu Kompozytowych Konstrukcji Lotniczych Instytutu Technicznego Wojsk Lotniczych: Wielowirnikowiec Atrax kilka lat temu w pierwotnej wersji został dostarczony użytkownikom w Algierii. W naszym kraju wykorzystuje go natomiast Lotnicza Akademia Wojskowa do realizacji szkoleń lotniczych. Ponadto platforma wykorzystywana jest wewnątrz ITWL do działalności badawczej, a mianowicie testów komponentów, podzespołów, sensorów, a także jako obiekt pozoracyjny do badań systemów antydronowych.
Dodam, że nasze bezpilotowce są konstrukcji polskiej z wykorzystaniem komponentów zagranicznych. Weźmy na przykład pakiety napędowe. Nikt w Polsce ogniw nie produkuje. ITWL kupuje gotowe akumulatory do zabudowy w BSP, natomiast w w Polsce następuje produkcja instalacji elektrycznej oraz integracja komponentów w gotowy bezzałgowiec. Kompozytowy kadłub BSP zarówno Atraxa i Neoxa jest rodzimej produkcji.

Instytut zrealizował projekt "Zastosowanie innowacyjnych i efektywnych metod i technologii umożliwiających wykrycie watah dzików, identyfikacji osobników z objawami klinicznymi ASF w naturalnym terenie ich występowania". Skąd wziął się pomysł na wniosek grantowy do Ministerstwa Rolnictwa i Rozwoju Wsi?
Jako ITWL dysponujemy doświadczeniem w rozwiązaniach bezzałogowych. Umiemy budować systemy dedykowane. W wypadku grantu temat został zamówiony przez Ministerstwo w ramach siódmego strategicznego kierunku badań naukowych i prac rozwojowych "Bezpieczeństwa i Obronność". Były w nim pewne założenia, które każdemu z wnioskodawców zostały przedstawione. Celem projektu było opracowanie systemu zdolnego do wykrywania watah dzików i identyfikacji osobników z objawami klinicznymi afrykańskiego pomoru świń. W jego zakres wchodziło opracowanie głowic termowizyjnych, które są nowe, nie bazujące na poprzednich rozwiązaniach, a także oprogramowania, algorytmów do identyfikacji obiektów. Różne podmioty składały swoje propozycje, nasza zaś okazała się być najlepszą. Dostaliśmy pozytywną decyzję o finansowaniu projektu w wysokości 11 milionów złotych brutto.
Jaka jest koncepcja działania bezpilotowców?
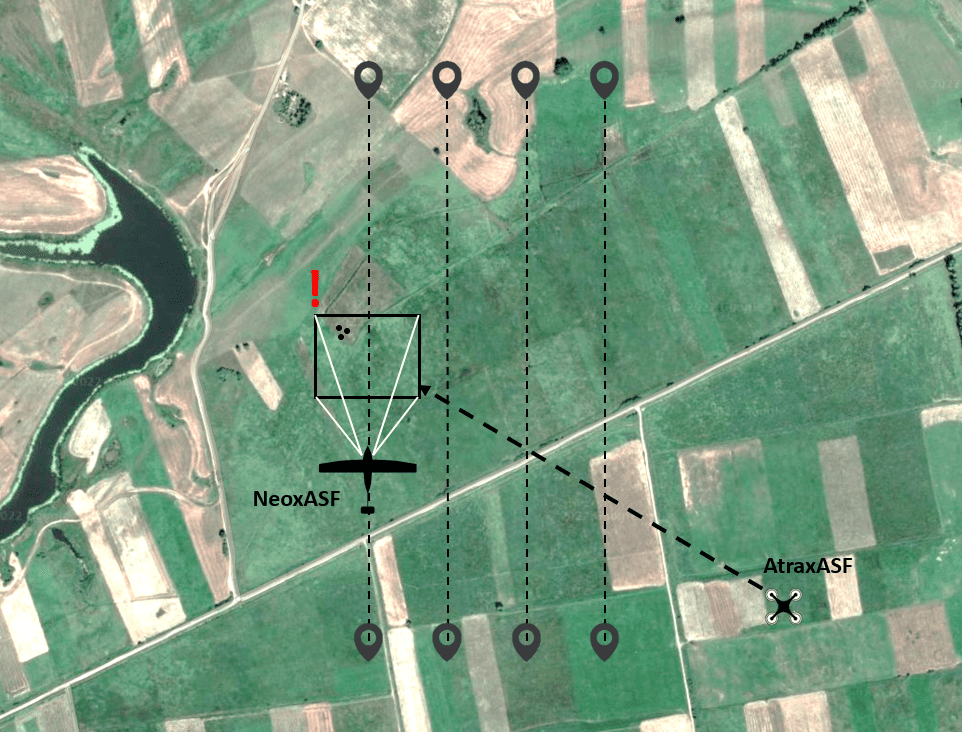
Zarówno podsystem NeoxASF jak i AtraxASF wchodzą w skład systemu ASFochrona.
Czym różnią się te podsystemy poza tym, że w skład pierwszego wchodzi samolot, a drugiego quadrokopter?
Pierwszy z nich służy do nalotu wielkoobszarowego i wstępnego rozpoznania, by odpowiedzieć na pytanie czy na danym obszarze znajduje się dzika zwierzyna. Samolot NeoxASF startuje z wyrzutni pneumatycznej, w przeciwieństwie do Atraxu, który jest pionowzlotem. Z kolei podsystem AtraxASF realizuje zadania w nalocie precyzyjnym. Jeżeli po oblocie wielkoobszarowym wiemy, że na danym obszarze znajduje się dzika zwierzyna, to podejmowana jest decyzja o użyciu podsystemu precyzyjnego AtraxASF, korzystając z podwieszonego modułu termalnego wysokiej rozdzielczości.
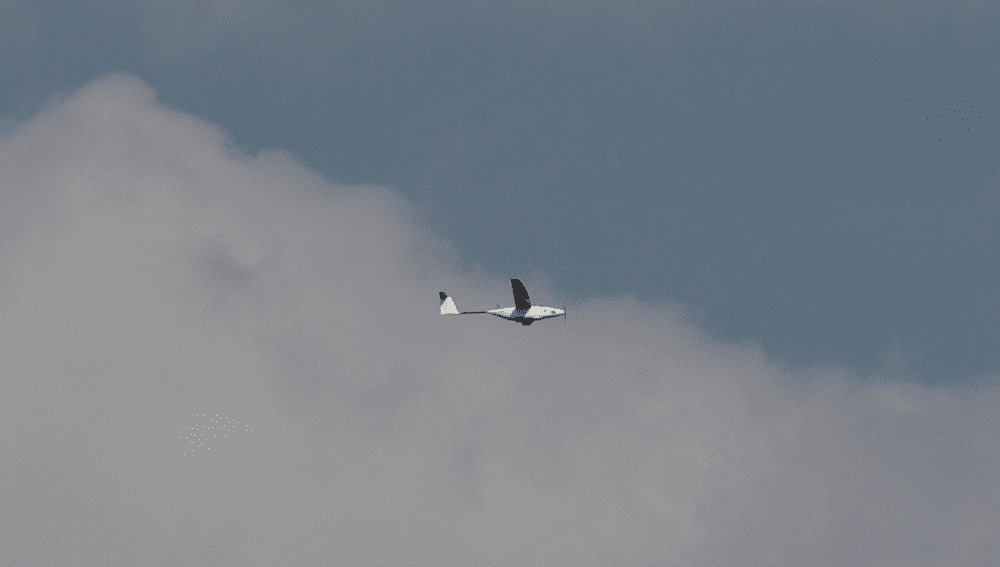
Wracając do kwestii ministerialnego projektu, to musieliśmy dostosować dotychczas istniejące rozwiązania. Weźmy na przykład stałopłat NeoxASF, który jest zmodernizowanym samolotem Neo3 producenta MSP. Modernizacji poddano wiele elementów w tym dolną część kadłuba, instalacje, oświetlenie oraz zastosowano komercyjny kontroler lotu. Został też zbudowany specjalny mechanizm do wysuwania głowicy optoelektronicznej. Dodatkowo została opracowana i zbudowana specjalnie do tego rozwiązania głowica stabilizująca kamerę. Podsumowując, jest to gotowy komponent dostosowany do projektu grantowego.
Każdy podsystem, czy to AtraxASF bądź NeoxASF, składa się z bezpilotowca oraz mobilnej stacji. Jakie są pomiędzy nimi różnice, a dokładnie między wozem dowodzenia w NeoxASF a wozem interwencyjnym AtraxASF?

Autor. ITWL
Pojazd dowodzenia w podsystemie NeoxASF jest pojazdem typu furgon, z napędem na cztery koła. Podniesiono trochę zawieszenie, by móc wjechać w trudniejszy teren. W wypadku podsystemu AtraxASF, to mamy do czynienia z interwencyjnym samochodem terenowym, zwiększając mobilność używania zestawu. Oba pojazdy są wyposażone w identyczne systemy łączności i na podobnych zasadach funkcjonują. W obu wypadkach ważna jest widoczność anteny, co jest problemem przy realizacji lotów na małych wysokościach. Pojazdy posiadają maszty pneumatyczne, aby zapewnić wymagany poziom sygnałów łączności.

Autor. ITWL
Jak prezentują się osiągi AtraxASF i NeoxASF? Na jak długo quadrokopter, bądź stałopłat mogą operować w powietrzu bez konieczności wymiany akumulatorów?
Długotrwałość lotu, jaką zapisaliśmy we wniosku projektowym dla BSP AtraxASF wynosiła 40 minut. Stosując najnowocześniejsze rozwiązania w zakresie ogniw napędowych uzyskujemy nawet 50 minut. Taka sytuacja miała miejsce podczas testów na długotrwałość lotu. Zasięg praktyczny AtraxASF wynosi 4,5 kilometrów, licząc od wozu interwencyjnego, zaś lot może realizować na wysokości od 5 do 350 metrów. Bezzałogowiec rozpędza się do prędkości 50 km/h.
Mówiąc o BSP NeoxASF wymaganiem projektowym było 90 minut, jednakże podczas ewaluacji osiągnęliśmy ponad 100 minut. Samolot może poruszać się z prędkościami od 65 do 130 kilometrów na godzinę, na maksymalnym pułapie 120 metrów.
Ile osób potrzebnych jest do obsługi podsystemów?
W wypadku AtraxASF do obsługi wystarczy jedna osoba. Jednakże dobrze jest operacyjnie robić to we dwie. Z kolei NeoxASF, ze względu na konieczność zastosowania wyrzutni i większej ilości pracy związanej z przygotowaniem do lotu, potrzebuje co najmniej dwóch osób, aczkolwiek zalecana jest większa ich liczba, aby sprawnie poprowadzić obserwację.
Skoro już mówimy o obserwacji, to poruszając kwestie techniczne chciałbym zapytać się o głowice optoelektroniczne w poszczególnych bezpilotowcach. Czym one się różnią?
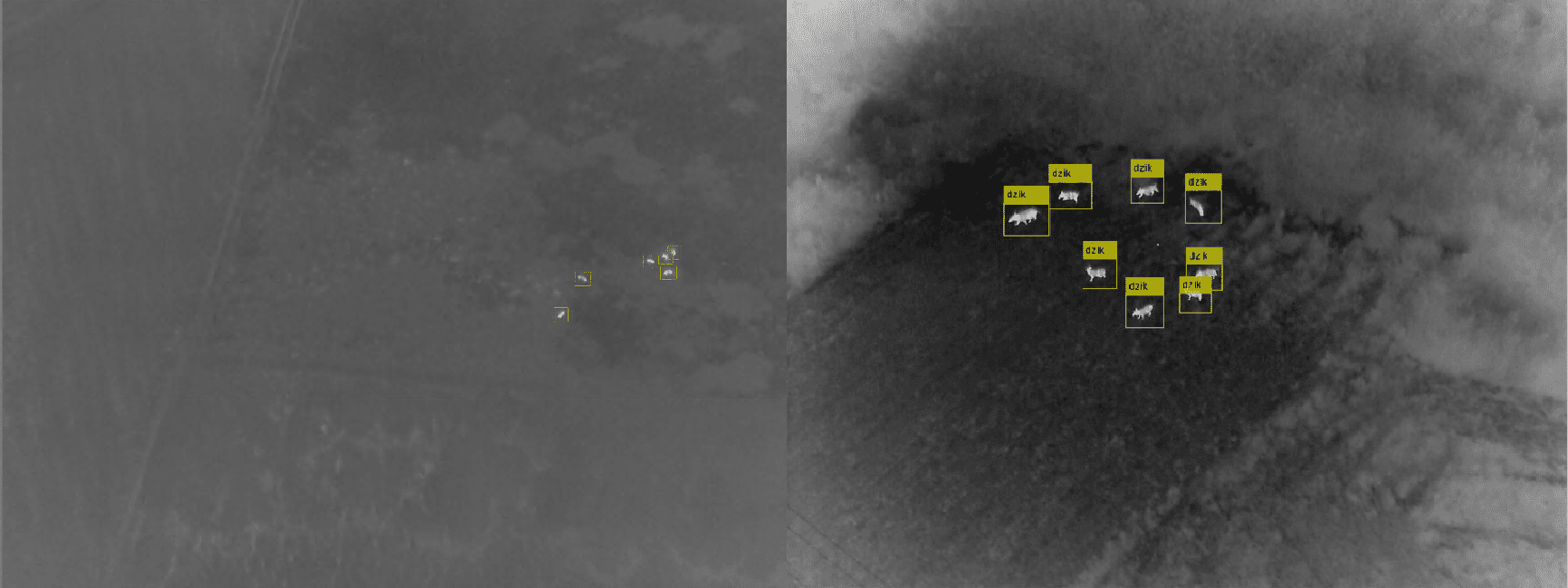
Stałopłat NeoxASF wykorzystuje chłodzony moduł termalny KTCH, z izraelskim sensorem. Moduł termalny był integrowany przez polską firmę Etronika z Sulejówka. Cechuje się on rozdzielczością 640x512 pikseli i częstotliwością klatkowania na poziomie 60 klatek na sekundę. AtraxASF posiada kamerę bolometryczną KTX wytworzoną przez firmę Etronika. W porównaniu do poprzednika posiada wyższą rozdzielczość - 1024x768 natomiast mniejszą częstotliwość klatkowania, w tym przypadku 30 klatek na sekundę. Przy tej rozdzielczości możemy już mówić o wojskowych zastosowaniach.
Autor. ITWL
W obu modułach detektory posiadają ten sam interfejs i protokół komunikacyjny Gigabit Ethernet oraz UART, a także zestaw bibliotek SDK (Software Development Kit), oprogramowanie wraz z kodem źródłowym do odbioru strumienia wideo po protokole UDP oraz oprogramowanie do konfiguracji kamery.
Jak wygląda przykładowa obserwacja?
Zaczynając od BSP AtraxASF, to pilot zazwyczaj wznosi go na wysokość 70-80 metrów nad poziomem gruntu. Pochyla on głowicę pod odpowiednim kątem, zazwyczaj wynosi on 40-45 stopni, i dookólnie szuka tzw. ciepłych punktów.
Jeżeli ciepłe punkty zostaną wykryte, wtedy pilot wykonuje lot w ten rejon i sprawdza już z bliska jakie to obiekty. W tym celu korzysta z panelu dotykowego stacji kontroli lotu, wyznaczając punktu do których bezzałogowiec powinien podlecieć.

W drugim urządzeniu NeoxASF wyznaczany jest obszar, w jakim dron będzie operował. Pilot planuje ścieżkę i według niej odbywa się cały lot. W obu wypadkach podczas operacji pilot kontroluje maszynę w czasie rzeczywistym. Do pojazdu interwencyjnego lub dowodzenia, w którym znajdują się osoby odpowiedzialne za BSP spływa cała telemetria wraz z obrazem. Tutaj może być przekazywany cały film lub pojedyncze klatki do głębszej analizy, wraz z współrzędnymi geograficznymi.
Autor. ITWL
Jak duży obszar można zbadać podczas jednego lotu?
Zależy to od odległości pomiędzy punktami i przyjętej taktyki operacyjnej. Jeśli chcemy naprawdę zgrubnie zbadać dany obszar, to wtedy może być nawet 150 km². W sytuacji gdy chcielibyśmy w 100% sprawdzić teren to w ciągu jednego lotu będzie to 10 do 15 km².
Czy instytucja dbająca o bezpieczeństwo granic mogłaby być zainteresowana pozyskaniem i wdrożeniem systemu ASFochrona na własny użytek?
Myślę, że jak najbardziej, gdyż obraz jaki uzyskujemy, jakość i wydajność systemu, gdzie tak, jak mówiłem, że w jednym locie jesteśmy w stanie precyzyjnie przeszukać do 15 km², to naszym zdaniem jest to bardzo dobry wynik kwalifikujący urządzenia do zadań z zakresu ochrony granicy.
System mógłby zostać skierowany na przykład do Straży Granicznej. Był to projekt realizowany na rzecz obronności i bezpieczeństwa państwa, więc w tym wypadku system mógłby być używany do wykrywania nielegalnego przekraczanie granicy państwowej.
Biorąc pod uwagę możliwość nadzoru terenów przygranicznych dochodzimy do istotnej kwestii, a mianowicie kogo jest łatwiej wykryć: człowieka czy dziką zwierzynę?
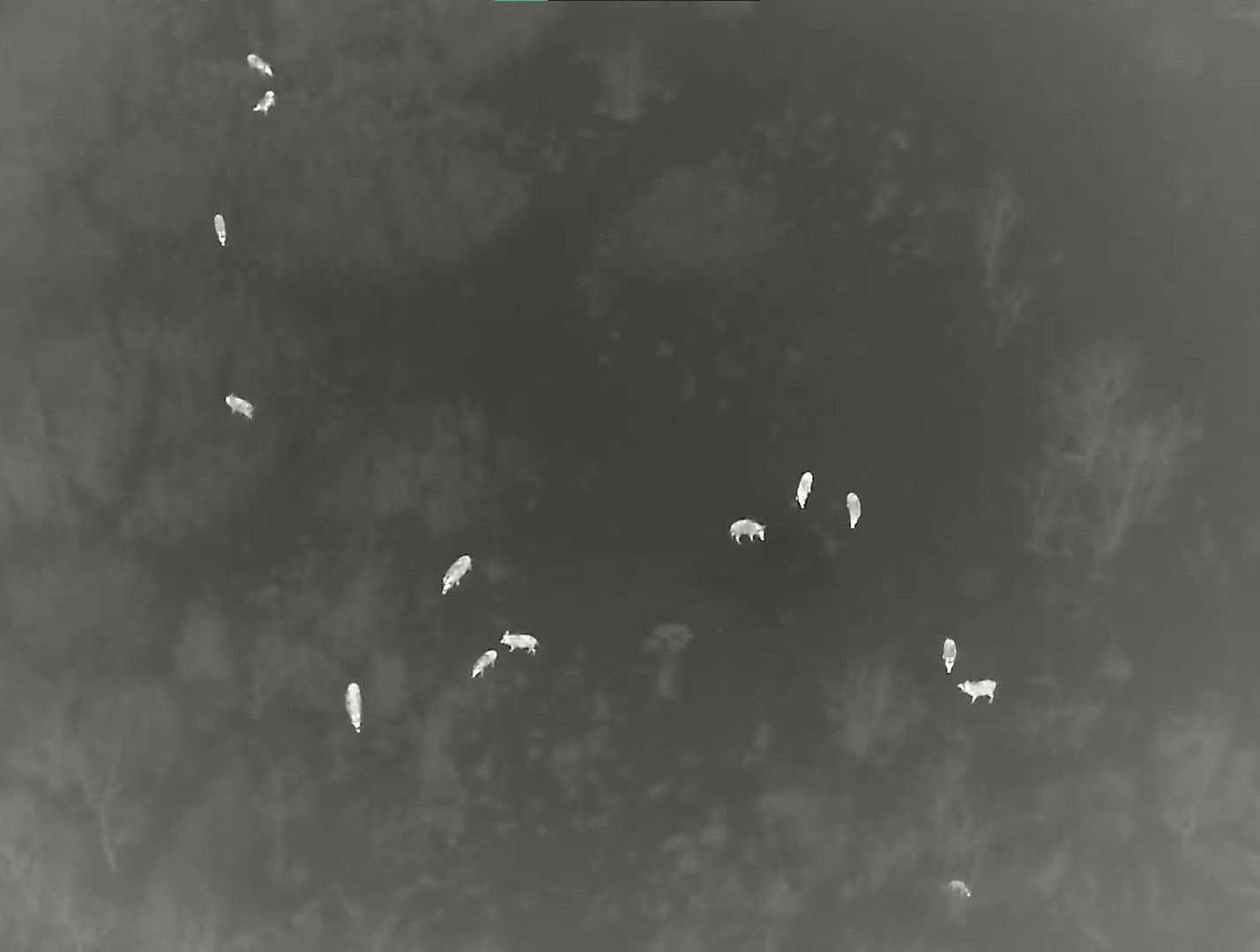
Zauważmy to, że detekcja człowieka jest znacznie łatwiejsza niż dzikiej zwierzyny. Z merytorycznego punktu widzenia identyfikacja i rozróżnianie gatunków jest trudniejsze. Sylwetka człowieka jest tak charakterystyczna, nie ważne czy stojącego bądź leżącego, że sprawia to łatwość rozpoznania, w porównaniu do średniej wielkości dzika, jelenia czy sarny. Mimo tego, że np. dziki emitują trochę więcej ciepła, to w większości mamy do czynienia z podobnymi temperaturami.

Autor. ITWL
W wypadku zwierząt też łatwiej się pomylić, w sytuacji kiedy nie dysponujemy kamerą o odpowiednio wysokiej jakości oraz rozdzielczości. Ze 120 metrów to możemy sobie wyobrazić, co widzimy na podstawie pojedynczej klatki o rozdzielczości 640x512 pikseli i obiektywie o stałej ogniskowej rzędu 30 mm.
Jakie są zatem potencjalne przeszkody w działaniu systemu ASFochrona?
Weźmy tu pod uwagę ograniczenia techniczne. Są to parametry związane z modułem termalnym a także po prostu ograniczenia tej metody, czyli detekcji w podczerwieni. Niedogodnością są przeszkody naturalne w postaci roślinności. Najlepiej rozpoznawanie działa na otwartych przestrzeniach lecz w ramach projektu staraliśmy się pozyskiwać obrazy w warunkach skrajnie niekorzystnych, czyli w sytuacji, gdy jest wysoka temperatura zewnętrzna i różnica pomiędzy obiektem a nagrzaną ziemią jest niewielka. Uzyskaliśmy wręcz zaskakujące rezultaty, co jest związane z dobrej jakości modułem termalnym firmy Etronika.

Na koniec chciałbym zapytać o dalsze plany Instytutu, zarówno dotyczące rozwoju bezzałogowców Atrax i Neox, jak i całej placówki?
Musimy cały czas pracować nad metodyką realizacji lotów operacyjnych, nad algorytmami, sprzętem by je udoskonalać. Musimy też uczyć się dobrego wykorzystywania sprzętu, żeby uzyskiwać jak największe efekty podczas eksploatacji. Zauważyłem to realizując ten projekt, porównując ze sobą pierwsze loty operacyjne i te odbywające się na sam koniec.
Jeżeli chodzi o obszar bezzałogowy, w Instytucie musimy cały czas pracować nad niezawodnością i trwałością sprzętu. Uważam, że to nadal jest nie do końca rozpoznana dziedzina, zarówno przez nas jak i innych, w tym chińskich producentów systemów bezzałogowych.

Autor. ITWL
Chciałbym też wprowadzić podejście systemowe do wszystkich rozwiązań. Pracujemy nad standaryzacją, żeby się dopasować pod użytkownika końcowego. Często systemy są zbyt wymagające i powinno się je upraszczać pod kątem żołnierzy i użycia operacyjnego. Musi być możliwość szybkiego usuwania usterek, serwisowania.
Pamiętajmy też, że bezzałogowce to są systemy wyspecjalizowane i dedykowane do danych działań operacyjnych. One są tylko wycinkiem całej naszej działalności, gdyż na nie składają się inne podsystemy, w tym obserwacyjne i łączności. Jest to wieloletnia praca całego Instytutu w stworzenie systemu i wchodzących w niego bezpilotowców, jakimi są AtraxASF i NeoxASF.
Dziękuję za rozmowę.
Dr inż. Paweł Szczepaniak jest kierownikiem Zakładu Kompozytowych Konstrukcji Lotniczych ITWL. W latach 2017-2022 kierował Pracownią Systemów Płynowych i Mechatronicznych Techniki Lotniczej w Zakładzie Samolotów i Śmigłowców. Ukończył Wojskową Akademię Techniczną na Wydziale Mechanicznym, na kierunku mechanika i budowa maszyn. W 2016 roku uzyskał stopień doktora nauk technicznych.
Materiał zrealizowany we współpracy z ITWL















